STM32F1和F4的区别?
- 内核不同:F1是Cortex-M3内核,F4是Cortex-M4内核;
- 主频不同:F1主频72MHz,F4主频168MHz;
- 浮点运算:F1无浮点运算单位,F4有;
- 功能性能:F4外设比F1丰富且功能更强大,比如GPIO翻转速率、上下拉电阻配置、ADC精度等;
- 内存大小:F1内部SRAM最大64K,F4有192K(112+64+16)。
介绍一下STM32启动过程
参考:STM32启动详细流程分析
- 通过Boot引脚设定,寻找初始地址
- 初始化栈指针: __initial_sp
- 指向复位程序: Reset_Hander
- 设置异常中断: HardFault_Handler
- 设置系统时钟: SystemInit
- 调用C库函数 : _main
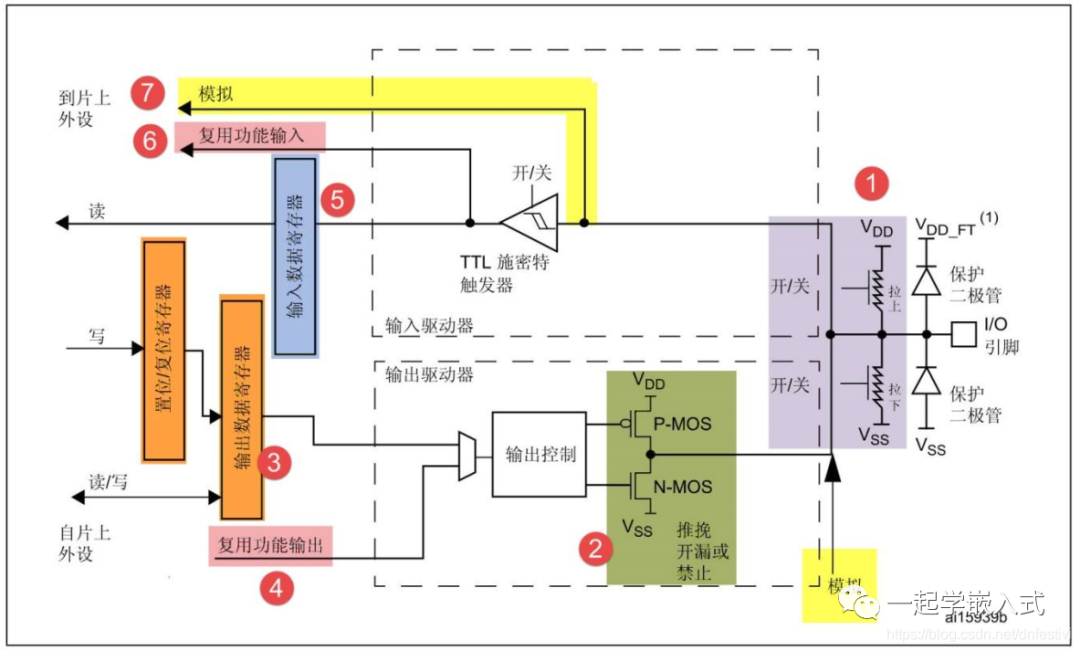
介绍一下GPIO
参考:详解 STM32 单片机 GPIO 的工作原理
GPIO 8种工作模式(gpio_init.GPIO_Mode):
1. GPIO_Mode_AIN 模拟输入
2. GPIO_Mode_IN_FLOATING 浮空输入
3. GPIO_Mode_IPD 下拉输入
4. GPIO_Mode_IPU 上拉输入
5. GPIO_Mode_Out_OD 开漏输出
6. GPIO_Mode_Out_PP 推挽输出
7. GPIO_Mode_AF_OD 复用开漏输出
8. GPIO_Mode_AF_PP 复用推挽输出
APB2负责 AD,I/O,高级TIM,串口1。
APB1负责 DA,USB,SPI,I2C,CAN,串口2345,普通TIM,PWR
UART
参考:透彻理解 UART 通信
问题一:串行通信方式介绍
同步通信:I2C 半双工,SPI 全双工
异步通信:RS485 半双工、RS232 全双工
问题二:串口配置
串口设置的一般步骤可以总结为如下几个步骤:
- 串口时钟使能,GPIO时钟使能
- 串口复位
- GPIO端口模式设置
TX的GPIO工作模式为:GPIO_Mode_AF_PP; //复用推挽输出
RX的GPIO工作模式为:GPIO_Mode_IN_FLOATING; //浮空输入- 串口参数初始化主要包含:波特率设置(115200)、8个数据位、1个停止位、无奇偶校验位、无硬件数据流控制、收发模式。
- 开启中断并且初始化NVIC(如果需要开启中断才需要这个步骤)
- 使能串口
- 编写中断处理函数

问题三:USART主要特点
- 全双工操作(相互独立的接收数据和发送数据);
- 同步操作时,可主机时钟同步,也可从机时钟同步;
- 独立的高精度波特率发生器,不占用定时/计数器;
- 支持5、6、7、8和9位数据位,1或2位停止位的串行数据桢结构;
- 由硬件支持的奇偶校验位发生和检验;
- 数据溢出检测;
- 帧错误检测;
- 包括错误起始位的检测噪声滤波器和数字低通滤波器
- 三个完全独立的中断,TX发送完成、TX发送数据寄存器空、RX接收完成;
- 支持多机通信模式;
- 支持倍速异步通信模式。
应用场景:GPS、蓝牙、4G模块
I2C
参考:全面解析 I2C 通信协议
问题一:I2C 总线在传送数据过程中共有三种类型信号
- 开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
- 结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。
- 应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。
CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
问题二:I2C主机模式端口该怎么配置
- 硬件模式:复用开漏输出、既不上拉也不下拉。(快速模式:400 Kbit/s)
- 软件模拟:推挽输出、配置上拉电阻。
问题三:I2C仲裁机制?
I2C 仲裁机制,理解了 线“与”(Wired-AND),就一目了然了。简单说,它遵循“低电平优先”的原则,即谁先发送低电平谁就会掌握对总线的控制权。
- 硬件模式: 是由通信速率设置的
/* STM32 I2C 快速模式 */ #define I2C_Speed 400000 /* 通信速率 */ I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;- 软件模拟: 没有设置通信速率,该怎么计算呢?
通过I2C总线位延迟函数 i2c_Delay:static void i2c_Delay(void) { uint8_t i; /* 下面的时间是通过安富莱AX-Pro逻辑分析仪测试得到的。 CPU主频72MHz时,在内部Flash运行, MDK工程不优化 循环次数为10时,SCL频率 = 205KHz 循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us 循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us IAR工程编译效率高,不能设置为7 */ for (i = 0; i < 10; i++); }- 应用场景:PMIC、加速度计、陀螺仪
SPI
参考:全面解析 SPI 通信协议
问题一:SPI需要几根线?
SPI 接口一般使用 4 条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS 从设备片选信号,由主设备控制。
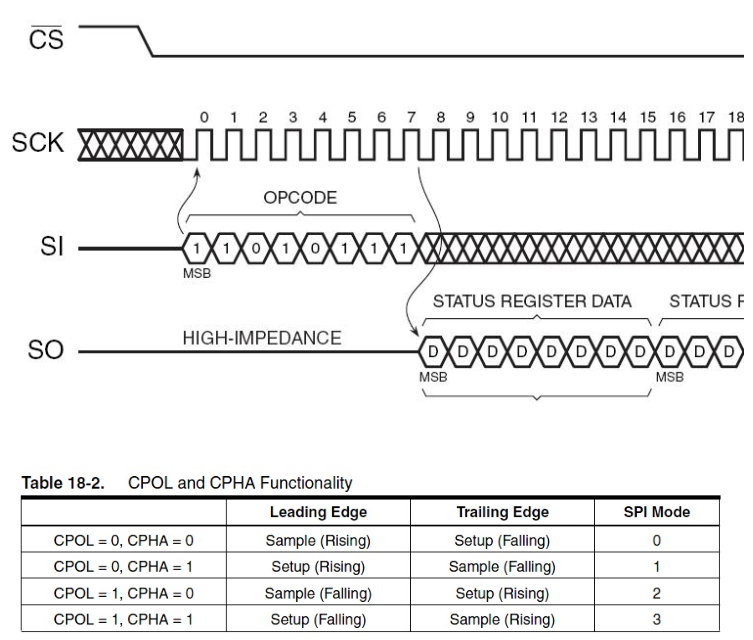
问题二:SPI通信的四种模式?
SPI 有四种工作模式,各个工作模式的不同在于 SCLK 不同, 具体工作由 CPOL,CPHA 决定。
- CPOL: (Clock Polarity),时钟极性。
SPI的CPOL,表示当SCLK空闲idle的时候,其电平的值是低电平0还是高电平1。
CPOL=0,时钟空闲idle时候的电平是低电平,所以当SCLK有效的时候,就是高电平,就是所谓的active-high;
CPOL=1,时钟空闲idle时候的电平是高电平,所以当SCLK有效的时候,就是低电平,就是所谓的active-low;

- CPHA:(Clock Phase),时钟相位。
相位,对应着数据采样是在第几个边沿(edge),是第一个边沿还是第二个边沿,0对应着第一个边沿,1对应着第二个边沿。
- CPHA=0,表示第一个边沿:
对于CPOL=0,idle时候的是低电平,第一个边沿就是从低变到高,所以是上升沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从高变到低,所以是下降沿;- CPHA=1,表示第二个边沿:
对于CPOL=0,idle时候的是低电平,第二个边沿就是从高变到低,所以是下降沿;
对于CPOL=1,idle时候的是高电平,第一个边沿就是从低变到高,所以是上升沿;

问题三:该如何确定使用哪种模式?
- 先确认从机需求的 SCLK 极性,不工作时是在低电位还是高电位,由此确认 CPOL 为 0 或 1。看原理图,我们设置串行同步时钟的空闲状态为高电平所以我们选择 SPI_CPOL_High。也就是CPOL为1。
- 再由slave芯片 datasheet 中的时序图确认 slave 芯片是在 SCLK 的下降沿采集数据,还是在SCLK的上升沿。
翻译一下:W25Q32JV通过SPI兼容总线访问,包括四个信号:串行时钟(CLK),芯片选择(/CS),串行数据输入(DI)和串行数据输出(DO)。
标准SPI指令使用DI输入引脚串行地将指令、地址或数据写入CLK上升沿上的设备。DO输出引脚用于从CLK下降沿上的设备读取数据或状态。支持模式0(0,0)和3(1,1)的SPI总线操作。
模式0和模式3关注的是当SPI总线主端处于待机状态,数据没有被传输到串行Flash时CLK信号的正常状态。对于模式0,在下降和上升时,CLK信号通常是低的边缘/ CS。对于模式3,在/CS的下降和上升边缘上CLK信号通常是高的。
既然串行同步时钟的空闲状态为高电平,这里我们选择第二个跳变沿,所以选择 SPI_CPHA_2Edge。也就是CPHA为1。
即,我们选择的是模式3(1,1)。
应用场景:SPI Flash,W25Q32 存储器容量 32Mb (4M x 8),即4M byte
CAN
参考:学习CAN通信协议
问题一:CAN总结介绍一下
CAN控制器根据 CAN_L 和 CAN_H上 的电位差来判断总线电平。总线电平分为显性电平和隐性电平,二者比居其一。发送方通过使总线电平发生变化,将消息发送给接收方。
问题二:CAN初始化配置步骤?
- 配置相关引脚的复用功能,使能CAN时钟
- 设置CAN工作模式及波特率等(CAN初始化环回模式,波特率500Kbps )
- 设置滤波器
问题三:CAN发送数据格式
CanTxMsg TxMessage;TxMessage.StdId=0x12; //标准标识符 TxMessage.ExtId=0x12; // 设置扩展标示符 TxMessage.IDE=CAN_Id_Standard; // 标准帧 TxMessage.RTR=CAN_RTR_Data; // 数据帧 TxMessage.DLC=len; // 要发送的数据长度 发送8个字节 for(i=0;i<len;i++) TxMessage.Data[i]=msg[i]; //数据
DMA
参考:学习嵌入式,DMA要会玩
问题一:DMA介绍?
直接存储器存取(DMA) 用来提供在外设和存储器之间,或者存储器和存储器之间的高速数据传输。无须CPU干预,数据可以通过DMA快速地移动,这就节省了CPU的资源来做其他操作。
问题二:DMA传输模式有几种?
DMA_Mode_Circular 循环模式
DMA_Mode_Normal 正常缓存模式
应用场景:GPS、蓝牙,都是用的循环采集,DMA_Mode_Circular模式。
一个比较重要的函数,获取当前剩余数据量大小,根据设置的接收buff大小减去当前剩余数据量 ,得到当前接收数据大小。
中断
问题一:描述一下中断的处理流程?
- 初始化中断,设置触发方式是上升沿/下降沿/双沿触发。
- 触发中断,进入中断服务函数
问题二:STM32的中断控制器支持多少个外部中断?
STM32的中断控制器支持 19 个外部中断/事件请求:
从图上来看,GPIO 的管脚 GPIOx.0~GPIOx.15(x=A,B,C,D,E,F,G)分别对应中断线 0 ~ 15。
另外四个EXTI线的连接方式如下:
- EXTI线16连接到PVD输出
- EXTI线17连接到RTC闹钟事件
- EXTI线18连接到USB唤醒事件
- EXTI线19连接到以太网唤醒事件(只适用于互联型产品)
中断服务函数列表:
IO口外部中断在中断向量表中只分配了7个中断向量,也就是只能使用7个中断服务函数。EXTI0_IRQHandler EXTI1_IRQHandler EXTI2_IRQHandler EXTI3_IRQHandler EXTI4_IRQHandler EXTI9_5_IRQHandler EXTI15_10_IRQHandler
STM32有几个时钟源
STM32 有5个时钟源:HSI、HSE、LSI、LSE、PLL。
- HSI是高速内部时钟,RC振荡器,频率为8MHz,精度不高。
- HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHz。
- LSI是低速内部时钟,RC振荡器,频率为40kHz,提供低功耗时钟。
- LSE是低速外部时钟,接频率为32.768kHz的石英晶体。
- PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。
RTOS的任务是怎么写的?如何切出这个任务?
解答:
一个任务,也称作一个线程。
UCOS有一个任务调度机制,根据任务的优先级进行调度。
一个是硬件中断, 那么系统会将当前任务有关变量入栈,然后执行中断服务程序,执行完成后出栈返回.
另一个是任务之间的切换,使用的方法就是任务调度,每一个任务有自己的栈,调度也是一样的入栈,然后执行另一个程序,然后出栈返回。
并非是每一任务按优先级顺序轮流执行的,而是高优先级的任务独占运行,除非其主动放弃执行,否则低优先级任务不能抢占,同时高优先级可以把放出去给低优先级任务使用的CPU占用权抢回来。所以ucos的任务间要注意插入等待延时,以便ucos切出去让低优先级任务执行。
UCOSII中任务间的通信方式有哪几种?
解答:
在UCOSII中,是使用信号量、邮箱(消息邮箱)和消息队列这些被称作事件的中间环节来实现任务间的通信的,还有全局变量。
信号量用于:
- 控制共享资源的使用权(满足互斥条件)
- 标志某时间的发生
- 使2个任务的行为同步
应用实例:互斥信号量
作为互斥条件,信号量初始化为 1。
实现目标:调用串口发送命令,必须等待返回“OK”字符过后,才能发送下一条命令。每个任务都有可能使用到此发送函数,不能出现冲突!消息队列:
概念:
- 消息队列实际上就是邮箱阵列
- 任务和中断都可以将一则消息放入队列中,任务可以从消息队列中获取消息。
- 先进入队列的消息先传给任务(FIFO)。
- 每个消息队列有一张等待消息任务的等待列表,如果消息列中没有消息,则等待消息的任务就被挂起,直到消息到来。
应用场景:
串口接收程序中的接收缓冲区。
储存外部事件。
项目使用了自定义协议,是什么结构?
解答:
了解过Modbus协议。详解 Modbus 通信协议(清晰易懂)
结构为:帧头(SDTC)+帧长度+指令+流水号+数据+CRC校验。
uCOSII和Linux的差异?
解答:
μC/OS-II是专门为计算机的嵌入式应用设计的,μC/OS-II 具有执行效率高、占用空间小、实时性能优良和可扩展性强等特点, 最小内核可编译至 2KB 。μC/OS-II 已经移植到了几乎所有知名的CPU 上。
linux 免费,安全,稳定,应用范围广,在嵌入式上,服务器上,家用机,都有广泛应用。
μC/OS-II Linux 都适合用在嵌入式上。但μC/OS-II 是专为嵌入式而设计,这样的结果是,运行效率更高,占用资源更少。
linux 都可以用作服务器上,使用率高。linux 虽然不是专门针对服务器而开发,但其源码公开,完全可以修改,使得两者差异不大,最主要的发行版 redhat linux 就是在服务器上用得很多的系统。
Git提交代码
问题:Git提交代码过程?
解答:
显示工作路径下已修改的文件:
$ git status进入修改文件目录:
$cd -显示与上次提交版本文件的不同:
$ git diff把当前所有修改添加到下次提交中:
$ git add .添加相关功能说明,(第一次提交使用这个)
$ git commit -s
其中还要注明:Fuction: 修改代码的功能
Ticket: 对应Bug号
注意:每一个文件夹下都要重新提一次。查看提交代码
$ tig .请勿修改已发布的提交记录! (以后提交使用这个)
$git commit --amend
命令模式下:
:x( 写入文件并退出)推送到服务器
$ git push origin HEAD:refs/for/master
ucosii和ucosiii和freeRTOS比较
问题一:三者比较?
解答:
- ucosii 和 freeRTOS比较:
- freeRTOS只支持TCP/IP, uCOSii则有大量外延支持,比如FS, USB, GUI, CAN等的支持。(我们用于tbox要用到CAN,所以选择uCOSii)
- freeRTOS 是在商业上免费应用。uCOSii在商业上的应用是要付钱的。
- 任务间通讯freeRTOS只支持队列, 信号量, 互斥量。uCOSii除这些外,还支持事件标志组,邮箱。
- 理论上讲,freeRTOS 可以管理超过64个任务,而uCOSii只能管理64个。
- ucosii 和 ucosiii 比较:
那么从μC/OS-II到μC/OS-III有哪些不同的地方呢?增加了什么,我们看改动还是很大的。
- 一个是原来只有0~63个优先级,而且优先级不能重复,现在允许几个任务使用同一个优先级,在同一个优先级里面,支持时间片调度法;
- 第二个是允许用户在程序运行中动态配置实时操作系统内核资源,比如,任务、任务栈、信号量、事件标志组、消息队列、消息数、互斥型信号量、存储块划分和定时器,可以在程序运行中变更。这样,用户可以避免在程序编译过程中出现资源不够分配的问题。
- 在资源复用上,也做了一些改进。μC/OS-II中,最多任务数有64个,到了版本2.82以后是256个,μC/OS-III中,用户可以由任意多的任务、任意多的信号量、互斥型信号量、事件标志、消息列表、定时器和任意分配的存储块容量,仅受限于用户CPU可以使用的RAM量。这个也是一个很大的扩展。
(问:邵老师,它的这个数是启动时就固定的,还是启动后随便定?)它是配置的时候可以自由定义的,只有你的RAM足够大的话。- 第四点是增加了很多功能,功能总是越来越多的,大伙可以看一下的。原来这些功能在μC/OS-II里面是没有的。
低功耗模式
问题一:低功耗模式有几种?唤醒方式是什么?
解答:

物联网的架构
问题一:物联网的架构分为几层? 每一层都负责哪些功能?
解答:
分三层,物联网从架构上面可以分为感知层、网络层和应用层
- 感知层: 负责信息采集和物物之间的信息传输,信息采集的技术包括传感器、条码和二维码、 RFID射频技术、音视频等多媒体信息。
信息传输包括远近距离数据传输技术、自组织组网技术、协同信息处理技术、信息采集中间件技术等传感器网络。
感知层是实现物联网全面感知的核心能力,是物联网中包括关键技术、标准化方面、产业化方面亟待突破的部分,关键在于具备更精确、更全面的感知能力,并解决低功耗、小型化和低成本的问题。- 网络层: 是利用无线和有线网络对采集的数据进行编码、认证和传输,广泛覆盖的移动通信网络是实现物联网的基础设施,是物联网三层中标准化程度昀高、产业化能力昀强、昀成熟的部分,关键在于为物联网应用特征进行优化和改进,形成协同感知的网络。
- 应用层: 提供丰富的基于物联网的应用,是物联网发展的根本目标,将物联网技术与行业信息化需求相结合,实现广泛智能化应用的解决方案集,关键在于行业融合、信息资源的开发利用、低成本高质量的解决方案、信息安全的保障以及有效的商业模式的开发。
内存管理
问题一:UCOS中内存管理的方法有哪些?
解答:
系统通过与内存分区相关联的内存控制块来对内存分区进行管理。
动态内存管理函数有:
- 创建动态内存分区函数OSMemCreate();
- 请求获得内存块函数OSMemGet();
- 释放内存块函数OSMemPut();
Ucos中任务状态哪几种?任务状态之间的关系图?
解答:
有5种状态:
睡眠状态、就绪状态、运行状态、等待状态(等待某一事件发生)和中断服务状态。
UCOSII 任务的5个状态转换关系:

ADC
简述STM32的ADC系统的功能特性
- 12bit分辨率
- 自动校准
- 可编程数据对齐(转换结果支持左对齐或右对齐方式存储在16位数据寄存器)
- 单次和连续转换模式
系统时钟
简述设置系统时钟的基本流程
- 打开HSE,等待就绪后,设置Flash等待操作。
- 设置AHB,APB1,APB2分频系数,确定他们各自和系统时钟的关系。
- 设置CFGR寄存器确定PLL的时钟来源和倍频系数(HSE外部8M*9倍=72MHz)。
- 使能PLL,将系统时钟源切换到PLL。
HardFault_Handler处理
问题一:造成原因
- 数组越界操作;
- 内存溢出,访问越界;
- 堆栈溢出,程序跑飞;
- 中断处理错误;
问题二:处理方式
怎样调试 STM32 硬件错误 HardFault
- 在startup_stm32f10x_cl.s里找到 HardFault_Handler 的地址重映射,并重新编写,让其跳转到 HardFaultHandle 函数。
- 打印查看R0、R1、R2、R3、R12、LR、PC、PSR寄存器。
- 查看Fault状态寄存器组(SCB->CFSR和SCB->HFSR)
TTS语音合成方法
问题一:sim7600 TTS语音使用什么方法
解答:
使用unicode编码合成声音
AT+CTTS=1,” 6B228FCE4F7F75288BED97F3540862107CFB7EDF”内容是“欢迎使用语音合成系统”,模块收发中文短信就是unicode编码,所以很容易将短信朗读出来;
直接输入文本,普通字符采用ASIIC码,汉字采用GBK编码。
AT+CTTS=2,”欢迎使用语音合成系统”
定时器
已知STM32的系统时钟为 72MHz,如何设置相关寄存器,实现20ms定时?
解答:
通过SysTick_Config(SystemCoreClock / OS_TICKS_PER_SEC))//1ms定时器
其中:uint32_t SystemCoreClock = SYSCLK_FREQ_72MHz; /*!< System Clock Frequency (Core Clock) */ #define SYSCLK_FREQ_72MHz 72000000 #define OS_TICKS_PER_SEC 1000 /* Set the number of ticks in one second如果需要20ms则,可以通一设置一个全局变量,然后定初值得为20,这样,每个systick中断一次,这个全局变量减1,减到0,即systick中断20次,时间为:1ms*20=20ms。从而实现 20ms 的定时。
STM32时钟系统详解
状态机
问题:使用的什么状态机?
解答:
参考文章:嵌入式软件状态机的实现方法
有限状态机,(英语:Finite-state machine, FSM),又称有限状态自动机,简称状态机。
假设状态机的状态转换由下表所示:
实现:(使用switch语句)//横着写 void event0func(void) { switch(cur_state) { case State0: action0; cur_state = State1; break; case State1: action1; cur_state = State2; break; case State2: action1; cur_state = State0; break; default:break; } } void event1func(void) { switch(cur_state) { case State0: action4; cur_state = State1; break; default:break; } } void event2func(void) { switch(cur_state) { case State0: action5; cur_state = State2; break; case State1: action6; cur_state = State0; break; default:break; } }

器件选型
STM32F407 VS STM32F103 主要功能及资源对比?
解答:

版权声明
文章来源于网络,版权归原作者所有,如有侵权,请联系删除。
原文:https://juyou.blog.csdn.net/article/details/116021595



